Publications
2025
-
 RoSHI: A Versatile Robot-oriented Suit for Human Data In-the-WildICRA 2026(under review), 2025
RoSHI: A Versatile Robot-oriented Suit for Human Data In-the-WildICRA 2026(under review), 2025We present RoSHI, a low-cost wearable that fuses 9 IMUs with Aria glasses to capture full-body motion, articulated hands, and egocentric video. Our design emphasizes long-horizon stability and occlusion robustness for humanoid learning. We introduce a simulation-in-the-loop retargeting framework that converts human data into physically feasible robot actions. 61.9% of captured sequences successfully deployed on a Unitree G1 humanoid, providing a scalable foundation for human-to-humanoid imitation learning.
-
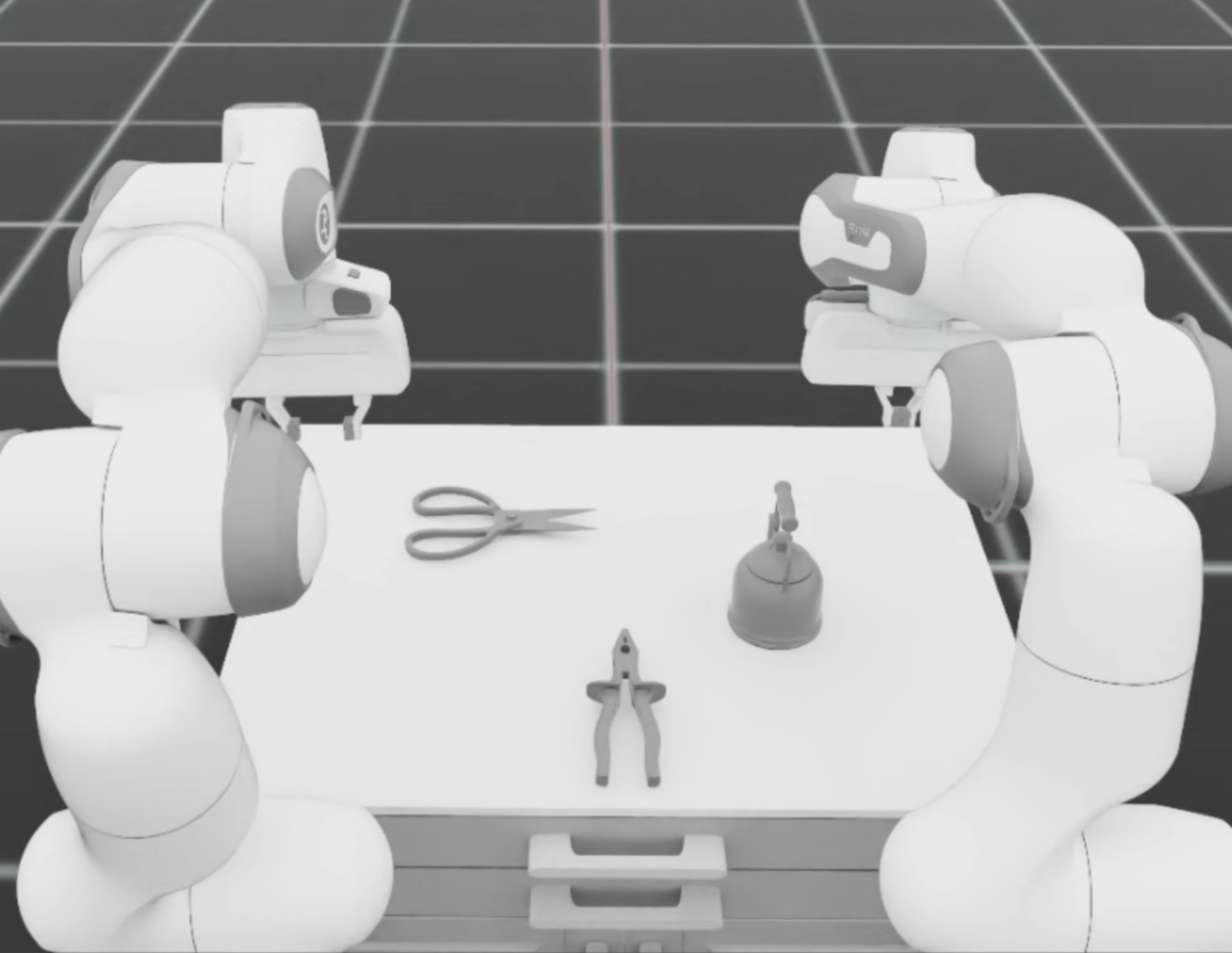 EUREKAWORLD: Scalable Real-World Manipulation via LLM-Automated RLRSS 2026(expected submission), 2025
EUREKAWORLD: Scalable Real-World Manipulation via LLM-Automated RLRSS 2026(expected submission), 2025We present Eureka for Manipulation, a large-scale RL framework that integrates LLMs to automate environment setup, reward shaping, and curriculum design for dexterous manipulation. Leveraging multi-GPU compute, our system couples LLM-guided simulation construction with massive RL optimization to generate diverse digital twins and achieve zero-shot sim-to-real transfer. We demonstrate robust transfer across manipulation tasks from single-arm tool use to bimanual coordination, and propose a paradigm for scalable reproducibility.