Hands-on Robotics Projects
EECS 464 Hands-on Robotics · University of Michigan · Fall 2022
A semester-long hands-on robotics course at the University of Michigan featuring 3 robot design projects. Each project focused on different mechanical designs, control systems, and autonomous behaviors, providing comprehensive hands-on experience in robotics development.
Project 0: Figure-8 Racing Robot
Built a robot to race through a figure-8 track under remote control using limited “joint” motors (190° rotation each). Designed T-shaped base with strategic motor placement and leg linkage mechanisms. Focused on mechanism design, four-bar linkages, rigid body motions, and rapid prototyping with modular robotics kits.

Project 1: Autonomous Waypoint Navigation
Developed an omnidirectional mobile robot with mecanum wheels for autonomous navigation between waypoints using limited sensing. Implemented AprilTag-based localization, particle filters for state estimation, and A* path planning for trajectory optimization.

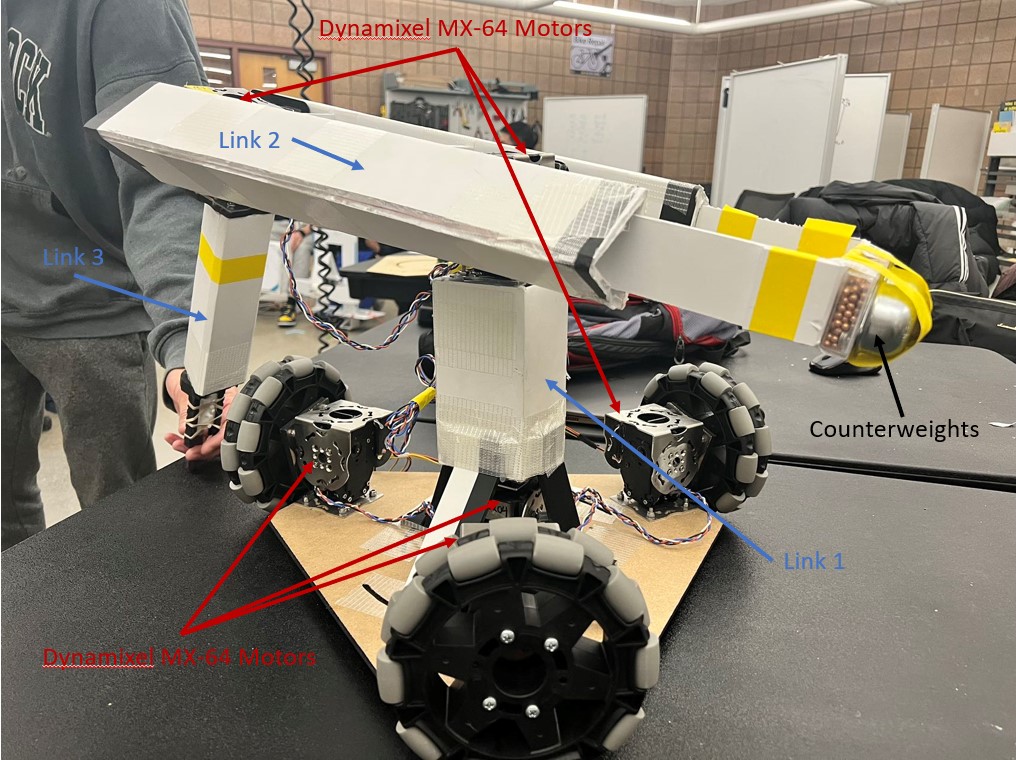
Project 2: Drawing Robot Arm
Designed and built an articulated robot arm capable of drawing on paper. Featured three-link kinematics with counterweights for gravity compensation, and PID control for precise end-effector positioning and trajectory following.